| Qui est en ligne ? | Il y a en tout 29 utilisateurs en ligne :: 10 Enregistrés, 1 Invisible et 18 Invités :: 3 Moteurs de recherche Bighorn, Bricole 63, Derbitaco, dga, Emmanuel Laurentz, frank, IHRE, petitpierre, supermono, Tobec02Le record du nombre d'utilisateurs en ligne est de 588 le Jeu 26 Sep - 4:33 |
|
| | [Technique] La ligne de force de la chaîne. |  |
|
+27MANETON Guichou chriss #333 sdvs cristogrr jmdonnat mickie pizzagalli Pickup Ed Cétautomatix Fügner Matthieu Giesse Xenu Apriliabarth Toop Emmanuel Laurentz fpayart Seb4LO Fabien lougassi mike Marc superkart Pignool janpol84 Eric Offenstadt 31 participants | |
| Auteur | Message |
|---|
Toop
Nombre de messages : 3919
Age : 17
Localisation : Tours
Date d'inscription : 02/01/2010
| Sujet: Re: [Technique] La ligne de force de la chaîne. ![[Technique] La ligne de force de la chaîne. - Page 6 Icon_minitime](https://2img.net/i/fa/icon_minitime.gif) Dim 7 Mar - 20:55 Dim 7 Mar - 20:55 | |
| "La connaissance ne vaut, que ce que tu en fais" celle là elle est de moué  si tu la gardes pour toi, à quoi va t'elle servir, tu es déjà au courant de son contenu ![[Technique] La ligne de force de la chaîne. - Page 6 809262](/users/3313/47/10/07/smiles/809262.gif) si tu la publies sur MJ, tu gagnes trois/quatre rond ( tout travail mérite salaire ) si tu la diffuses ici, tu auras toute notre gratitude ![[Technique] La ligne de force de la chaîne. - Page 6 980796](/users/3313/47/10/07/smiles/980796.gif) ( quoi que, j'achèterai bien MJ pour le coup ![[Technique] La ligne de force de la chaîne. - Page 6 771973](/users/3313/47/10/07/smiles/771973.gif) ) de toute façon, on a un immense avantage, on peut te poser des questions ! ![[Technique] La ligne de force de la chaîne. - Page 6 241515](/users/3313/47/10/07/smiles/241515.gif) |
| | | | Eric Offenstadt

Nombre de messages : 3592
Localisation : Sète
Date d'inscription : 23/11/2009
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Lun 8 Mar - 9:23 | |
| J'attend l'approbation de Jân Pôl ! |
| | | | Xenu

Nombre de messages : 30
Localisation : france
Date d'inscription : 24/04/2011
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Ven 29 Juil - 4:22 | |
| - Eric Offenstadt a écrit:
- Une controverse fait rage sur un blog rival et non moins ami, sur une théorie cautionnée par la majorité des Écoles d'Ingénieurs, et techniques et notamment l'Université de PADOUE... référence en la matière:
la "CHAIN LINE FORCE".
[Vous devez être inscrit et connecté pour voir cette image]
Image grande taille
Bien commençons. Tout d'abord, une petite citation que pépé aime souvent rapporter : "ceux qui savent font, ceux qui ne savent pas enseignent". Il faut savoir que celui qui a dit ça était enseignant à Princeton. C'est donc une boutade d'auto-dérision au premier degré. Faut-il considérer cette phrase au premier degré ? C'est un peu comme un célèbre sociologue américain qui commençait ses conférences par " le monde se divise en deux catégories : ceux qui divisent le monde en catégories et ceux qui ne sont pas sociologues". Ca détend certes l'atmosphère mais est-ce bien le cas ici ? En effet Albert était un partisan convaincu de la "connaissance asymptotique" c'est à dire que toute théorie est fausse, elle n'est qu'une "meilleure" approximation de la réalité, laquelle vérité ne sera finalement jamais atteinte mais seulement approchée de plus en plus jusqu'à la fin des temps. Par exemple la théorie de Newton était un incontestable progrès mais elle était fausse à partir d'un certain point, la théorie de la relativité restreinte était un incontestable progrès par rapport à la mécanique Newtonienne mais elle montait aussi ses limites puis la théorie de la relativité générale marque aussi une avancée etc... Donc dans sa bouche : "ceux qui savent" est à prendre au second voire au troisième degré. "ceux qui savent" doit se comprendre par "ceux qui sont persuadés de savoir". "ceux qui ne savent pas" doit s'interpréter par "ceux qui savent qu'ils ne savent pas", "ceux qui sont conscients de leur propre ignorance". Ceux qui sont humbles devant la connaissance scientifique et qui tentent de transmettre le peu qu'ils savent. prenons un exemple concret : j'ai lu dans ce forum que tu portais un jugement critique (c'est TRES bien) sur tes propres créations et que tu écrivais que la But n'étais pas la réussite que tu espérais. Si par la magie d'une machine à remonter le temps tu te trouvais 45 ans en arrière face au jeune éric à la fringante moustache prêt à réaliser sa But. Il était (tu es bien placé pour savoir ce qu'il pensait à l'époque) persuadé que ça allait être fantastique et qu'il "allait tous les pourrir" avec. etc ... Que ferais-tu en face de ce jeunot ? Tu lui expliquerais qu'il se trompe, qu'il a oublié ceci ou cela que les IUWA se prennent en compte comme ça... Bref, toi qui a mesuré par tout le parcours que tu as fait que la connaissance est fragile et qu'il n'y a pas de certitude absolue, tu lui enseignerais tes acquis. C'est très exactement ce que voulait dire Albert. Donc dire de quelqu'un qu'il est "ignorant" et que c'est pour cette raison "qu'il enseigne" est au contraire un compliment. Ce sont ceux qui sont pétris de certitudes qui se lancent dans le bain de façon particulièrement inconsciente. Je ne suis pas certain que c'est de cette façon que tu interprétais la phrase.  C'est donc juste une petite interprétation à ajuster et la lumière se fait. Pour le poster c'est pareil, il dit la même chose que toi, c'est juste un petit ajustement d'interprétation qui est nécessaire.  Venons en à présent au fameux poster sujet de tant de controverses... ![[Technique] La ligne de force de la chaîne. - Page 6 758538](/users/3313/47/10/07/smiles/758538.gif) ... bien inutiles essayons de regarder froidement ce qu'il représente. Je précise que je ne travaille pas dans la moto (ni de près ni de loin) que je ne travaille pas non plus dans l'automobile et pas non plus dans la mécanique des solides rigides. J'en ai juste quelques souvenirs de l'époque (hélas lointaine) où j'étais moi-même étudiant. J'ai quand même fait quelques (euphémisme) études en mécanique, mais dans un domaine particulièrement différent. Prenons l'image en haut à gauche : Elle représente une moto vue de profil. Le rédacteur y a fait figurer en vert deux petites flèches vertes sensées représenter les réactions du sol sur les roues à l'équilibre statique. Il indique sur le dessin un point particulier : le centre de masse. Dans le cas où le solide est uniquement soumis à un champ gravitationnel et à aucune accélération, le commun des mortels appelle aussi souvent ce point centre de gravité. Le terme centre de masse est plus approprié puisque s'y exercent toutes les forces volumiques (actions à distance) s'exerçant sur la masse. Par exemple dans le cas de forces électromagnétiques c'est en ce point que s'exerceront les forces en question, dans le cas où le solide est soumis à des accélérations c'est en ce point qu'on a coutume d'appliquer des forces dites improprement d'inertie. Nous y voyons aussi en bleu des flèches représentant un transfert de charge (on surcharge l'arrière et on soulage l'avant c'est une accélération). On y fait apparaitre une force rouge qui se superpose à la réaction statique sol/roue arrière pour former la réaction dynamique sol/roue arrière. C'est à dire que force verte + force rouge = réaction totale sol/roue (arrière). Cette force rouge se compose d'une composante verticale bleue (déjà citée) et d'une composante horizontale blanche : la poussée. Pour qu'il y ait équilibre instantané il faut que le solide (la moto) oppose une force égale et opposée : une charge dirigée vers le bas et une force de trainée dirigée horizontalement. Je suis très modérément d'accord pour appliquer la trainée (drag) à la hauteur du centre de masse : pour moi elle doit s'exercer au centre de poussée autrement il a existence d'un moment aérodynamique, mais bon passons, on va supposer qu'il veut parler d'une "force d'inertie" s'exerçant au centre de masse ... Nous avons donc une ligne rouge support de la force rouge. Elle forme un angle tau avec l'horizontale. Si l'on exprime le moment de cette force seule (action au sol) par rapport au point d'articulation du bras oscillant il est clair que tel que représenté sur le dessin, cette force produira un moment positif donc aura tendance à provoquer une élongation de l'amortisseur. Mais il y a aussi la chaine (ou le couple conique de la transmission par arbre, ou l'arbre de la pompe de la transmission hydraulique...) qui va aussi produire un moment. Passons à présent à l'image suivante en haut à droite, celle qui fait polémique. :) Nous y voyons cette fois un dessin de la transmission (ici une chaine). Il est clair que le brin tendu va exercer une traction. Cette traction va se traduire par un moment, négatif cette fois qui aura selon le dessin tendance à faire pivoter le bras oscillant de façon à comprimer amortisseur. L'auteur fait figurer sur ce dessin un point particulier le point A, ceux qui veulent briller en société peuvent raconter que c'est le point où l'axe central du torseur pénètre dans le plan de la chaine etc ... mais ce qui est intéressant c'est que ce point est remarquable puisque si l'axe du bras oscillant était situé en A (avec la même inclinaison du bras évidemment), le moment exercé par la traction de la chaine serait nul. Bon le hic c'est que le point A n'est pas invariant et change avec la position du bras oscillant, c'est un point fictif qui sert uniquement pour la compréhension. Par ce point A (où plus précisément par la ligne perpendiculaire au plan de la moto passant par A) et par le point de contact de la roue avec le sol il fait passer un plan. Point, trait, plan, les vieux cours d'isostatisme qui remontent à la surface : par une droite et un point on fait passer un plan et un seul. La trace de ce plan vu de coté forme un angle sigma avec le sol. Je te concède que l'appellation "chain force line " est pour le moins maladroite, ce n'est en aucun cas le support d'une force, mais passons... Passons à l'étage en dessous : la discussion des trois cas possibles. première image en bas à gauche : les angles tau et sigma sont égaux. La direction de la force en rouge passe par le point A donc le moment de cette force en A est nul lui aussi, comme ce point est justement celui où le moment de la tension de chaine est nul lui aussi les deux moments s'équilibrent, il n'y a aucun effort supplémentaire demandé aux ressorts de l'amortisseur. Rien ne bouge. Ca veut dire que le moment du à la tension de la chaine équilibre celui du à la poussée sur le sol. Seconde image au milieu et en bas : l'angle sigma est inférieur à tau. La direction de la force rouge ne passe plus par le point A, ça veut dire que le moment de la force rouge par rapport au point A n'est pas nul. Il faut alors rajouter un autre moment pour atteindre l'équilibre, c'est le moment d'une force supplémentaire appliquée par le ressort de l'amortisseur. Donc il y a compression de l'amortisseur (signe des moments), c'est ce qui est représenté. Passons à la dernière image : cette fois l'angle sigma est supérieur à tau. Le moment de la force rouge par rapport au point A est positif, il faut appliquer un moment négatif pour atteindre l'équilibre, cela va se traduire par un effort dans l'autre sens sur le ressort de l'amortisseur, celui-ci va être en partie soulagé, il va se détendre, l'arrière va se soulever. C'est très exactement ce que je t'ai lu expliquer en long et en large dans ce forum. Les IUWA+ provoquent ceci les IUWA- provoquent cela... Bon il est tard (tôt) la suite dans le prochain message... |
| | | | Giesse

Nombre de messages : 446
Localisation : Eure et loire
Date d'inscription : 14/10/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Ven 29 Juil - 5:08 | |
| Xenu : merci pour ce cour magistral ! enfin une explication qui ne pourra donnée lieu a aucun commentaire tordu : c'est clair, net ET prècis. Un rêve.
Tout ceux qui, comme moi, ont été un peu vite à l'école se coucheront moins bête ce soir grâce à toi...
|
| | | | Invité
Invité
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Ven 29 Juil - 6:32 | |
| Tout est relatif, selon l'endroit où qu'on naît !
Malgré mon niveau presque nul en physique, je crois comprendre, jusqu'au moment où je constate que n'ayant pas le niveau, cela restera une croyance. Le chrono est ma seule béquille!
Par contre, l'attitude correct (Affirmation, explication, digressions, conclusion) le temps passé pour se mettre au niveau des derniers de la classe, je dis bravo à l'homme ! |
| | | | Eric Offenstadt
Nombre de messages : 3592
Localisation : Sète
Date d'inscription : 23/11/2009
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Ven 29 Juil - 8:37 | |
| AYANT ÉTÉ D'ACCORD AVEC TOUT CE QUI S'EST DIT PRÉCÉDEMMENT PENDANT LES 3/4 DE MA VIE : JE NE VAIS PAS DIRE QUE C'EST COMPLÈTEMENT IDIOT, C'EST CLAIR ! "Chapeau pour la démonstration de Xenu: c'est du grand art !"
Maintenant je suis content que "l'AFFAIRE de PADOUE" soit remise sur la tapis, car elle est symptomatique du combat éternel entre l'expérience et le savoir reçu....
... Et çà tombe bien: Je suis en vacances jusqu'au 13 Août !!!
Tout peut se résumer en une seule phrase : "En mécanique, pas de contact = pas de force exercée".
Si l'on représente une moto dans son seul plan transversal avec les roues semblant toucher le sol, mais en fait à quelques micron du sol : Plus aucune force ni aucun vecteur ne peut plus s'exercer et subséquemment la représentation ci-dessus, POURTANT IDENTIQUE deviendra complètement fausse.
Padoue semble l'ignorer, mais le phénomène est identique en ce qui concerne le système de transmission: Si l'on supprime la relation entre le système de chaîne et le reste de la moto : Pas de force exercée.
Et par quels contacts le système chaîne est-il en relation avec le reste de la moto pour passer la puissance et les réactions ?
Par les deux axes sur lesquels sont posés le "KIT CHAINE", c'est à dire l'arbre de boite et l'arbre de roue arrière.
Aucune force ni vecteur ne peut sortir d'aucun système d'un transmission par ailleurs que par ses axes.
Çà ! C'est le simple bons sens du mécano qui à vérifié 1000 fois qu'en mécanique, on ne peut faire bouger quelque pièce que ce soit SANS CONTACT.
Alors on est bien là dans le cas d'espèce décrit par le vice recteur de l'École Supérieure de Mécanique de Nantes : Cas où les calculs mathématiques théoriques de résistance de matériaux deviennent, aux yeux de certains, plus crédibles que les tests de casses des éprouvettes des dits matériaux.
C'est à dire où à force de se croire infaillible, on se met inconsciemment à croire que la réalité obéit aux vecteurs alors que, bien sûr les mécaniciens ont tous expérimenté l'inverse: Les vecteurs doivent obéir au réel.
Donc voilà bien le coeur du problème !
La télékinésie (pouvoir de faire bouger des objets à distance) est elle crédible en mécanique ?
Personnellement, je suis obligé d'utiliser des outils, des ustensiles ou des pièces mécanique pour exercer des forces réelles sur d'autres objets mécaniques. Je sais, c'est peu pratique, surtout pour échafauder des théories utilisant des forces courbes (pour rejoindre le plan médian) et "sans contact réel" avec le mobile.
Quand on considère une moto uniquement au plan transversal: Pendant des décades j'ai pensé que la chaîne avait une fonction comparable à celle d'un bras de suspension qui aurait un axe (contact) vissé sur le châssis à hauteur de la tangente au pignon de chaîne. Et si c'était le cas alors toutes les démonstrations de PADOUE seraient parfaitement justifiées par le dit contact...
...Il est probable que la confusion vienne de là !
Quand à moi, je n'ai aucun mérite, la chance aidant, un beau jour, en manipulant et testant la maquette d'une suspension arrière (1999), je me suis aperçu du véritable piège qu'une suspension à chaîne constitue pour les yeux lorsqu'on ne la considère sur un seul plan. Je pourrais vous citer d'autres confusions similaires que j'ai découverte dans des brevets ne fonctionnant qu'au plan de l'élévation longitudinale. C'est très "piégeux" !
Dans le monde du réel, les tests confirment que le seul point neutre du système suspension se produit quand les points de contacts réels du système de transmission sont alignés avec l'axe réel du bras.
Mais quel merveilleux exemple, avouez le !
"La théorie, c'est quand on sait tout et que rien ne fonctionne. La pratique, c'est quand tout fonctionne et que personne ne sait pourquoi. Ici, nous avons réuni théorie et pratique : Rien ne fonctionne... et personne ne sait pourquoi!’’ Le souriant Albert ![[Technique] La ligne de force de la chaîne. - Page 6 998726](/users/3313/47/10/07/smiles/998726.gif)
Dernière édition par Eric Offenstadt le Ven 29 Juil - 15:08, édité 1 fois |
| | | | Matthieu
Nombre de messages : 52
Age : 47
Localisation : (91)
Date d'inscription : 05/03/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Ven 29 Juil - 9:39 | |
| Bonjour,
Je lis beaucoup (énormément !) le forum mais ne poste pas, bien que je discute en MP avec Eric.
Mais je me décide un mettre un petit commentaire.
"L'effet de chaine" est, pour moi, très simple et se résume ainsi : A l'accelération, la chaine cherche uniquement à raccourcir son brin supérieur (sur une moto tout ce qu'il a de plus conventionnelle).
Il y a donc 2 cas de figure :
1) l'axe du bras est supérieur à la droite passant par l'axe du pignon et l'axe de la roue : la suspension se détend à l'accelération (effet antisquat)
2) l'axe du bras est inférieur à la droite passant par l'axe du pignon et l'axe de la roue : la suspension se comprime à l'accelération (effet squat)
Il y a aussi un 3ème cas, d'équilibre, quand les 3 axes sont alignés. Mais dès le moindre mouvement, route, moto, pilote, l'équilibre sera rompu pour passer soit dans le cas 1, soit dans le cas 2.
Par contre, pour avoir fait quelques expérimentation echelle 1, j'ajoute que "l'effet de chaine" est vraiment minime par rapport aux effets de la géométrie qui permet d'attacher mécaniquement la roue arrière au reste de la moto (bras, quadrilatère, coulisseau, ...) |
| | | | Eric Offenstadt
Nombre de messages : 3592
Localisation : Sète
Date d'inscription : 23/11/2009
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Ven 29 Juil - 13:54 | |
| - Matthieu a écrit:
- "Bonjour,
Je lis beaucoup (énormément !) le forum mais ne poste pas, bien que je discute en MP avec Eric.
Mais je me décide un mettre un petit commentaire.
"L'effet de chaine" est, pour moi, très simple et se résume ainsi : A l'accelération, la chaine cherche uniquement à raccourcir son brin supérieur (sur une moto tout ce qu'il a de plus conventionnelle).
Il y a donc 2 cas de figure :
1) l'axe du bras est supérieur à la droite passant par l'axe du pignon et l'axe de la roue : la suspension se détend à l'accélération (effet antisquat)
2) l'axe du bras est inférieur à la droite passant par l'axe du pignon et l'axe de la roue : la suspension se comprime à l'accélération (effet squat)
Il y a aussi un 3ème cas, d'équilibre, quand les 3 axes sont alignés. Mais dès le moindre mouvement, route, moto, pilote, l'équilibre sera rompu pour passer soit dans le cas 1, soit dans le cas 2.
Par contre, pour avoir fait quelques expérimentation echelle 1, j'ajoute que "l'effet de chaine" est vraiment minime par rapport aux effets de la géométrie qui permet d'attacher mécaniquement la roue arrière au reste de la moto (bras, quadrilatère, coulisseau, ...)"
EXACTEMENT ce que toute personne ayant tâté de l'expérimentation peut constater |
| | | | Marc
Admin

Nombre de messages : 28161
Age : 66
Localisation : Villiers sur Marne (94)
Date d'inscription : 27/05/2008
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Ven 29 Juil - 14:41 | |
| |
| | | | Eric Offenstadt
Nombre de messages : 3592
Localisation : Sète
Date d'inscription : 23/11/2009
| | Sujet: u tot Ven 29 Juil - 15:02 | |
| - Xenu a écrit:
"Tout d'abord, une petite citation que pépé aime souvent rapporter : "ceux qui savent font, ceux qui ne savent pas enseignent".
Il faut savoir que celui qui a dit ça était enseignant à Princeton. C'est donc une boutade d'auto-dérision au premier degré.
Faut-il considérer cette phrase au premier degré ?
C'est un peu comme un célèbre sociologue américain qui commençait ses conférences par " le monde se divise en deux catégories : ceux qui divisent le monde en catégories et ceux qui ne sont pas sociologues". Ca détend certes l'atmosphère mais est-ce bien le cas ici ?
En effet Albert était un partisan convaincu de la "connaissance asymptotique" c'est à dire que toute théorie est fausse, elle n'est qu'une "meilleure" approximation de la réalité, laquelle vérité ne sera finalement jamais atteinte mais seulement approchée de plus en plus jusqu'à la fin des temps.
Par exemple la théorie de Newton était un incontestable progrès mais elle était fausse à partir d'un certain point, la théorie de la relativité restreinte était un incontestable progrès par rapport à la mécanique Newtonienne mais elle montait aussi ses limites puis la théorie de la relativité générale marque aussi une avancée etc...
Donc dans sa bouche : "ceux qui savent" est à prendre au second voire au troisième degré.
"ceux qui savent" doit se comprendre par "ceux qui sont persuadés de savoir".
"ceux qui ne savent pas" doit s'interpréter par "ceux qui savent qu'ils ne savent pas", "ceux qui sont conscients de leur propre ignorance". Ceux qui sont humbles devant la connaissance scientifique et qui tentent de transmettre le peu qu'ils savent.
prenons un exemple concret : j'ai lu dans ce forum que tu portais un jugement critique (c'est TRES bien) sur tes propres créations et que tu écrivais que la But n'étais pas la réussite que tu espérais. Si par la magie d'une machine à remonter le temps tu te trouvais 45 ans en arrière face au jeune éric à la fringante moustache prêt à réaliser sa But. Il était (tu es bien placé pour savoir ce qu'il pensait à l'époque) persuadé que ça allait être fantastique et qu'il "allait tous les pourrir" avec. etc ...
Que ferais-tu en face de ce jeunot ? Tu lui expliquerais qu'il se trompe, qu'il a oublié ceci ou cela que les IUWA se prennent en compte comme ça... Bref, toi qui a mesuré par tout le parcours que tu as fait que la connaissance est fragile et qu'il n'y a pas de certitude absolue, tu lui enseignerais tes acquis.
C'est très exactement ce que voulait dire Albert.
Donc dire de quelqu'un qu'il est "ignorant" et que c'est pour cette raison "qu'il enseigne" est au contraire un compliment. Ce sont ceux qui sont pétris de certitudes qui se lancent dans le bain de façon particulièrement inconsciente.
"Je ne suis pas certain que c'est de cette façon que tu interprétais la phrase." :
Et bien tu peux en être certain maintenant : je ne fais pas que citer Albert, je l'ai lu aussi, savait qu'il était enseignant (ce qui donne d'autant plus de force à sa phrase) et je connais donc son célèbre sens de l'humour ! Venons en à présent au fameux poster sujet de tant de controverses... bien inutiles
essayons de regarder froidement ce qu'il représente.
Je précise que je ne travaille pas dans la moto (ni de près ni de loin) que je ne travaille pas non plus dans l'automobile et pas non plus dans la mécanique des solides rigides. J'en ai juste quelques souvenirs de l'époque (hélas lointaine) où j'étais moi-même étudiant. J'ai quand même fait quelques (euphémisme) études en mécanique, mais dans un domaine particulièrement différent.
Prenons l'image en haut à gauche :
Elle représente une moto vue de profil.
Le rédacteur y a fait figurer en vert deux petites flèches vertes sensées représenter les réactions du sol sur les roues à l'équilibre statique.
Il indique sur le dessin un point particulier : le centre de masse. Dans le cas où le solide est uniquement soumis à un champ gravitationnel et à aucune accélération, le commun des mortels appelle aussi souvent ce point centre de gravité. Le terme centre de masse est plus approprié puisque s'y exercent toutes les forces volumiques (actions à distance) s'exerçant sur la masse. Par exemple dans le cas de forces électromagnétiques c'est en ce point que s'exerceront les forces en question, dans le cas où le solide est soumis à des accélérations c'est en ce point qu'on a coutume d'appliquer des forces dites improprement d'inertie.
Nous y voyons aussi en bleu des flèches représentant un transfert de charge (on surcharge l'arrière et on soulage l'avant c'est une accélération).
On y fait apparaitre une force rouge qui se superpose à la réaction statique sol/roue arrière pour former la réaction dynamique sol/roue arrière. C'est à dire que force verte + force rouge = réaction totale sol/roue (arrière).
Cette force rouge se compose d'une composante verticale bleue (déjà citée) et d'une composante horizontale blanche : la poussée.
Pour qu'il y ait équilibre instantané il faut que le solide (la moto) oppose une force égale et opposée : une charge dirigée vers le bas et une force de trainée dirigée horizontalement. Je suis très modérément d'accord pour appliquer la trainée (drag) à la hauteur du centre de masse : pour moi elle doit s'exercer au centre de poussée autrement il a existence d'un moment aérodynamique, mais bon passons, on va supposer qu'il veut parler d'une "force d'inertie" s'exerçant au centre de masse ...
Nous avons donc une ligne rouge support de la force rouge. Elle forme un angle tau avec l'horizontale.
Si l'on exprime le moment de cette force seule (action au sol) par rapport au point d'articulation du bras oscillant il est clair que tel que représenté sur le dessin, cette force produira un moment positif donc aura tendance à provoquer une élongation de l'amortisseur.
Mais il y a aussi la chaine (ou le couple conique de la transmission par arbre, ou l'arbre de la pompe de la transmission hydraulique...) qui va aussi produire un moment. Parfaitement d'accord !
Passons à présent à l'image suivante en haut à droite, celle qui fait polémique. :)
Nous y voyons cette fois un dessin de la transmission (ici une chaine). Il est clair que le brin tendu va exercer une traction. Cette traction va se traduire par un moment, négatif cette fois qui aura selon le dessin tendance à faire pivoter le bras oscillant de façon à comprimer amortisseur.
L'auteur fait figurer sur ce dessin un point particulier le point A, ceux qui veulent briller en société peuvent raconter que c'est le point où l'axe central du torseur pénètre dans le plan de la chaine etc ... mais ce qui est intéressant c'est que ce point est remarquable puisque si l'axe du bras oscillant était situé en A (avec la même inclinaison du bras évidemment), le moment exercé par la traction de la chaine serait nul. Bon le hic c'est que le point A n'est pas invariant et change avec la position du bras oscillant, c'est un point fictif qui sert uniquement pour la compréhension. Par ce point A (où plus précisément par la ligne perpendiculaire au plan de la moto passant par A) et par le point de contact de la roue avec le sol il fait passer un plan. Point, trait, plan, les vieux cours d'isostatisme qui remontent à la surface : par une droite et un point on fait passer un plan et un seul. La trace de ce plan vu de coté forme un angle sigma avec le sol. Je te concède que l'appellation "chain force line " est pour le moins maladroite, ce n'est en aucun cas le support d'une force, mais passons... Toujours OK pour moi !
"Passons à l'étage en dessous : la discussion des trois cas possibles.
1°première image en bas à gauche : les angles tau et sigma sont égaux. La direction de la force en rouge passe par le point A donc le moment de cette force en A est nul lui aussi, comme ce point est justement celui où le moment de la tension de chaine est nul lui aussi les deux moments s'équilibrent, il n'y a aucun effort supplémentaire demandé aux ressorts de l'amortisseur. Rien ne bouge.
Ca veut dire que le moment du à la tension de la chaine équilibre celui du à la poussée sur le sol.
2° Seconde image au milieu et en bas : l'angle sigma est inférieur à tau. La direction de la force rouge ne passe plus par le point A, ça veut dire que le moment de la force rouge par rapport au point A n'est pas nul. Il faut alors rajouter un autre moment pour atteindre l'équilibre, c'est le moment d'une force supplémentaire appliquée par le ressort de l'amortisseur. Donc il y a compression de l'amortisseur (signe des moments), c'est ce qui est représenté.
3°Passons à la dernière image : cette fois l'angle sigma est supérieur à tau. Le moment de la force rouge par rapport au point A est positif, il faut appliquer un moment négatif pour atteindre l'équilibre, cela va se traduire par un effort dans l'autre sens sur le ressort de l'amortisseur, celui-ci va être en partie soulagé, il va se détendre, l'arrière va se soulever.
C'est là que notre description du phénomène diffère un peu.
Dans ma vision du problème, tout ce que tu dis se produit vraiment, mais en 3 type d'influences :
1° Par l'angle du bras, qui tout naturellement va influer de + en + sur l'assiette de la machine. (Énorme importance).
2° Au delà et en deçà de l'alignement des 3 axes : Boite/Bras/Pignon (Faible importance).
3° Par la production d'IUWA induite par la démultiplication et bien sûr en co-relation avec le 1° et le 2°, mais là on n'influe plus sur l'assiette seule mais sur la hauteur du seul C. d G.
"C'est très exactement ce que je t'ai lu expliquer en long et en large dans ce forum. Les IUWA+ provoquent ceci les IUWA- provoquent cela..."
Oui, et j'ajouterais que puisque l'angle de la chaîne avec l'axe pignon couronne (qui à mon avis n'est qu'une représentation géométrique directe du rapport de démultiplication) induise une liaison au sol soit parfaite (et donc la suppression des IUWA "pro-squat" actuelles) il serait nécessaire (avec des angles de bras conventionnels), que cet angle soit l'inverse de ce qui est présenté sur le croquis de PADOUE.
Autrement dit SI LE POINT VIRTUEL "A" POUVAIT EXISTER: Il devrait se situer derrière la moto.  Au total, nous disons pratiquement la même chose et je ne suis pas tout à fait sûr que la nuance ne vienne pas uniquement de mon langage déficient.... |
| | | | Xenu
Nombre de messages : 30
Localisation : france
Date d'inscription : 24/04/2011
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 0:37 | |
| - Eric Offenstadt a écrit:
- Xenu a écrit:
"Passons à l'étage en dessous : la discussion des trois cas possibles.
1°première image en bas à gauche : les angles tau et sigma sont égaux. La direction de la force en rouge passe par le point A donc le moment de cette force en A est nul lui aussi, comme ce point est justement celui où le moment de la tension de chaine est nul lui aussi les deux moments s'équilibrent, il n'y a aucun effort supplémentaire demandé aux ressorts de l'amortisseur. Rien ne bouge.
Ca veut dire que le moment du à la tension de la chaine équilibre celui du à la poussée sur le sol. Dans ce premier cas, la position du bras ne change pas par rapport à la position statique. Pas de mouvement de suspension donc pas d'IUWA. Il ne se passe rien. Maintenant comme tu le dis plus bas si le point A (la droite perpendiculaire à la moto dont la trace sur la figure est notée A) est "hors de portée de la réaction au sol" par exemple si il est derrière la moto (géométriquement c'est possible : si un concepteur original place le pignon de sortie de boite très haut par exemple) alors cet état numéro un (l'équilibre) ne sera pas atteignable et n'existera pas en fonctionnement de la moto. Ce n'est pas très malin comme conception mais c'est physiquement possible, la moto subira alors un changement d'assiette par le seul fait de rouler. [Vous devez être inscrit et connecté pour voir cette image] - Eric Offenstadt a écrit:
- Xenu a écrit:
2° Seconde image au milieu et en bas : l'angle sigma est inférieur à tau. La direction de la force rouge ne passe plus par le point A, ça veut dire que le moment de la force rouge par rapport au point A n'est pas nul. Il faut alors rajouter un autre moment pour atteindre l'équilibre, c'est le moment d'une force supplémentaire appliquée par le ressort de l'amortisseur. Donc il y a compression de l'amortisseur (signe des moments), c'est ce qui est représenté.
3°Passons à la dernière image : cette fois l'angle sigma est supérieur à tau. Le moment de la force rouge par rapport au point A est positif, il faut appliquer un moment négatif pour atteindre l'équilibre, cela va se traduire par un effort dans l'autre sens sur le ressort de l'amortisseur, celui-ci va être en partie soulagé, il va se détendre, l'arrière va se soulever.[/i] C'est là que notre description du phénomène diffère un peu.
Dans ma vision du problème, tout ce que tu dis se produit vraiment, mais en 3 type d'influences :
1° Par l'angle du bras, qui tout naturellement va influer de + en + sur l'assiette de la machine. (Énorme importance). la variation (même faible) de l'angle du bras va entrainer un "nouveau" point A donc tout est à refaire, il faut chercher un nouvel équilibre (qui n'existe pas forcément ... d'où talonnage par exemple) - Eric Offenstadt a écrit:
2° Au delà et en deçà de l'alignement des 3 axes : Boite/Bras/Pignon (Faible importance). L'alignement des 3 axes c'est comme une éclipse de soleil c'est très rare. Dans le poster qu'il y ait alignement ou pas, le résultat est le même. - Eric Offenstadt a écrit:
3° Par la production d'IUWA induite par la démultiplication et bien sûr en co-relation avec le 1° et le 2°, mais là on n'influe plus sur l'assiette seule mais sur la hauteur du seul C. d G.
"C'est très exactement ce que je t'ai lu expliquer en long et en large dans ce forum. Les IUWA+ provoquent ceci les IUWA- provoquent cela..."
Oui, et j'ajouterais que puisque l'angle de la chaîne avec l'axe pignon couronne (qui à mon avis n'est qu'une représentation géométrique directe du rapport de démultiplication) [Vous devez être inscrit et connecté pour voir cette image]Et voilà : avec un "pignon" de même taille que la couronne (démultiplication 1:1) le point A est EXACTEMENT au même endroit, et produit le même effet. :) - Eric Offenstadt a écrit:
induise une liaison au sol soit parfaite (et donc la suppression des IUWA "pro-squat" actuelles) il serait nécessaire (avec des angles de bras conventionnels), que cet angle soit l'inverse de ce qui est présenté sur le croquis de PADOUE. Voilà, bravo tu viens de dire le mot important : c'est juste un CROQUIS. Poincarré disait " la géométrie c'est l'art de raisonner juste sur des figures fausses". Il faut redonner à ce poster sa véritable place : c'est un outil pédagogique pour faire réfléchir les étudiants. Ca ressemble vaguement à une moto(c'est plus agréable pour eux de travailler sur un truc qu'ils aiment plutôt que sur un informel système articulé), ça permet de faire un bilan des différents efforts et moments et de réfléchir sur l'équilibre de l'ensemble. Ce n'est pas un outil de conception de moto. - Eric Offenstadt a écrit:
Autrement dit SI LE POINT VIRTUEL "A" POUVAIT EXISTER: Il devrait se situer derrière la moto. c'est possible je peux même te dessiner une moto stupide avec le point A sous le niveau du sol, ça veut simplement dire que quelle que soit la direction de l'action au sol, on sera systématiquement dans le cas où sigma (un angle négatif) est inférieur à tau donc le cas deux. Cette stupide moto s'assiéra systématiquement, quoique fasse son malheureux pilote. - Eric Offenstadt a écrit:
Au total, nous disons pratiquement la même chose et je ne suis pas tout à fait sûr que la nuance ne vienne pas uniquement de mon langage déficient.... Vous ne faites pas le même métier. Tu es concepteur de motos : tu parles le langage technique et concret. Cosalter a deux casquettes : c'est un chercheur, il essaie de modéliser, de sortir des lois. Pour cela c'est très simple il pose le problème et essaie d'utiliser l'outil mathématique/numérique/informatique pour aller le plus loin possible et voir si les résultats de la simulation collent à la réalité. Parfois il est obligé de déshabiller le problème de son enveloppe technique pour mieux comprendre. Par exemple pour étudier le contact du pneu sur le sol, il peut étudier (c'est juste un exemple) le contact d'un parallélépipède de caoutchouc sur une surface rugueuse. A lui par la suite de réinjecter ces résultats dans son modèle pour rendre au final son simulateur plus performant. Sa seconde casquette : c'est un enseignant. Il doit offrir à ses étudiants une motivation pour se casser la tête (et surtout "apprendre à apprendre") sur des problèmes à la limite de leurs connaissances présentes. C'est pour ça que le modèle présenté dans ses posters est "rustique". Tous les effets ne sont pas pris en compte parce que ce serait sans doute trop compliqué pour eux. En particulier il ne prend pas en compte dans ses travaux pédagogiques les "microglissements" que tu a baptisés IUWA. :lol: ...mais dans ses publications de recherche il en parle... et ce n'est pas le seul. Justement revenons à présent sur les IUWAs. J'ai lu que tu les exprimais en mm.  je vais t'offrir un ![[Technique] La ligne de force de la chaîne. - Page 6 541298](/users/3313/47/10/07/smiles/541298.jpg) et tu me copieras cent fois : "une longueur s'exprime en mm, une accélération s'exprime en mm/s²" Franchement si un vaudock lisait ça il te demanderait pourquoi tu l’asticotes sur le transfert de masse ou de charge et pourquoi tu écris ça.  Bon on va dire qu'en fait ce sont des iuw D (displacement) ![[Technique] La ligne de force de la chaîne. - Page 6 809516](/users/3313/47/10/07/smiles/809516.gif) Imaginons que nous soyons dans le cas 1 : c'est l'équilibre parfait entre les moments. Seulement la piste n'est pas lisse (rappelles moi : ce n'était pas Opatija que les pilotes avaient surnommée "la piste de motocross la plus rapide du monde" ?) et la roue rencontre un bump de longueur L et de hauteur h. La moto roule à la vitesse V. [Vous devez être inscrit et connecté pour voir cette image]On va supposer que la suspension est parfaite et que le centre de masse de la moto reste à une altitude constante, seule la roue subit une levée de h. Tu connais parfaitement ta géométrie et ton épure te dit que pour une course de suspension de h ça te crée un iuwD :) de x. La durée du phénomène est dt = L/V La vitesse de glissement relative de la roue est donc de Vr = x V/L En terme de vitesse angulaire : oméga relatif = x V /(L R) si R est le rayon de la roue. Soit une accélération angulaire (ayé on a enfin des iuw A) : omégaprim = x V²/(L² R) Donc on va faire un calcul simple on va supposer que la roue est un disque parfait (un disque théorique sans épaisseur de masse m). Le moment d'inertie d'un tel disque est m R²/2 Par conséquent le moment engendré par cet iuwa sera M = m R x V² /(2 L) Ce moment est à ajouter dans l'équilibre du bras oscillant et selon le signe de ce moment (selon le signe de ton iuwD ou iuwA) la moto sera dans le cas deux ou le cas trois. Tu vois que finalement il dit TRES EXACTEMENT la même chose que toi !!! mieux, il te fournit gratuitement un support pédagogique pour expliquer à tous les ânes de pit-lane pourquoi un iuwa+ produit tel effet et un iuwa- tel autre... Alors un petit ![[Technique] La ligne de force de la chaîne. - Page 6 727249](/users/3313/47/10/07/smiles/727249.gif) à Cosalter ? |
| | | | Giesse
Nombre de messages : 446
Localisation : Eure et loire
Date d'inscription : 14/10/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 5:56 | |
| Xenu je suis obligé (!!!) de répéter ce que j'ai dit hier a 7h 08. Bravo.javascript:emoticonp(' ') PS : et oui je suis flemmard, mais je ne vais pas faire un travail inutile un samedi matin ! Pour une fois que je n'ai rien a faire d'urgent, je profite... |
| | | | Fügner

Nombre de messages : 9266
Localisation : Neuf-trois
Date d'inscription : 27/11/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 7:49 | |
| [quote="Xenu"][quote="Eric Offenstadt"] - Xenu a écrit:
Seulement la piste n'est pas lisse (rappelles moi : ce n'était pas Opatija que les pilotes avaient surnommée "la piste de motocross la plus rapide du monde" ?) et la roue rencontre un bump de longueur L et de hauteur h.
J'apporte ma frêle bougie  à la lumière du soleil, c'est à peu près en rapport: C'est Mike Hailwood qui nommait ainsi le circuit d'Imatra en Finlande. Pour le reste, s'est constitué le noyau d'une révolution dans la conception de nos engins, heureusement sans risque de déboucher: les décideurs veillent... Merci pour vos apports et le magnifique effort de vulgarisation |
| | | | Eric Offenstadt
Nombre de messages : 3592
Localisation : Sète
Date d'inscription : 23/11/2009
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 9:35 | |
| Bravo Xenu pour tes brillantes démonstrations, accessibles à tous et plaisantes à lire. _______________________________________________________ "Les hommes sont dénués d'entendement et, bien que prêtant l'oreille, ils sont pareils aux sourds. Un dicton leur convient tout à fait: les présents sont absents" (HÉRACLITE) ![[Technique] La ligne de force de la chaîne. - Page 6 800210](/users/3313/47/10/07/smiles/800210.gif)
Dernière édition par Eric Offenstadt le Sam 30 Juil - 15:31, édité 3 fois |
| | | | Cétautomatix

Nombre de messages : 41
Localisation : Petit village bien connu
Date d'inscription : 09/11/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 11:42 | |
| Bravo Xenu pour tes brillantes démonstrations, accessibles à tous et plaisantes à lire.Il est vrai que venant de quelqu'un qui affiche un bon goût aussi sûr en matière de choix motocycliste... Forza le motociclette alla bolognese |
| | | | Eric Offenstadt
Nombre de messages : 3592
Localisation : Sète
Date d'inscription : 23/11/2009
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 16:06 | |
| Tout d'abord, merci Xenu, de nous accorder ton temps et d'adopter une attitude constructive, car nous ne sommes ici que pour çà ! - Xenu a écrit:
-
- Eric Offenstadt a écrit:
- Xenu a écrit:
2° Seconde image au milieu et en bas : l'angle sigma est inférieur à tau. La direction de la force rouge ne passe plus par le point A, ça veut dire que le moment de la force rouge par rapport au point A n'est pas nul. Il faut alors rajouter un autre moment pour atteindre l'équilibre, c'est le moment d'une force supplémentaire appliquée par le ressort de l'amortisseur. Donc il y a compression de l'amortisseur (signe des moments), c'est ce qui est représenté.
3°Passons à la dernière image : cette fois l'angle sigma est supérieur à tau. Le moment de la force rouge par rapport au point A est positif, il faut appliquer un moment négatif pour atteindre l'équilibre, cela va se traduire par un effort dans l'autre sens sur le ressort de l'amortisseur, celui-ci va être en partie soulagé, il va se détendre, l'arrière va se soulever. C'est là que notre description du phénomène diffère un peu.
Dans ma vision du problème, tout ce que tu dis se produit vraiment, mais en 3 type d'influences :
1° Par l'angle du bras, qui tout naturellement va influer de + en + sur l'assiette de la machine. (Énorme importance). la variation (même faible) de l'angle du bras va entrainer un "nouveau" point A donc tout est à refaire, il faut chercher un nouvel équilibre (qui n'existe pas forcément ... d'où talonnage par exemple) C'est clair
- Eric Offenstadt a écrit:
2° Au delà et en deçà de l'alignement des 3 axes : Boite/Bras/Pignon (Faible importance). L'alignement des 3 axes c'est comme une éclipse de soleil c'est très rare. Dans le poster qu'il y ait alignement ou pas, le résultat est le même. C'est clair !
- Eric Offenstadt a écrit:
3° Par la production d'IUWA induite par la démultiplication et bien sûr en co-relation avec le 1° et le 2°, mais là on n'influe plus sur l'assiette seule mais sur la hauteur du seul C. d G.
"C'est très exactement ce que je t'ai lu expliquer en long et en large dans ce forum. Les IUWA+ provoquent ceci les IUWA- provoquent cela..."
Oui, et j'ajouterais que puisque l'angle de la chaîne avec l'axe pignon couronne(qui à mon avis n'est qu'une représentation géométrique directe du rapport de démultiplication) [Vous devez être inscrit et connecté pour voir cette image]
"Et voilà : avec un "pignon" de même taille que la couronne (démultiplication 1:1) le point A est EXACTEMENT au même endroit, et produit le même effet".
Non XENU ! Là çà ne fonctionne que si tu as changé la localisation de l'axe de sortie de boite, et tu sais bien qu'alors l'alignement des axes serait impossible et qu'alors la production d'IUWA détruirait le pneu en 2 coups de cuillère à pot !!! : Vilain garçon ! krkrkr
- Eric Offenstadt a écrit:
induise une liaison au sol soit parfaite (et donc la suppression des IUWA "pro-squat" actuelles) il serait nécessaire (avec des angles de bras conventionnels), que cet angle soit l'inverse de ce qui est présenté sur le croquis de PADOUE. "Voilà, bravo tu viens de dire le mot important : c'est juste un CROQUIS.
Poincarré disait " la géométrie c'est l'art de raisonner juste sur des figures fausses".
Il faut redonner à ce poster sa véritable place : c'est un outil pédagogique pour faire réfléchir les étudiants. Ca ressemble vaguement à une moto(c'est plus agréable pour eux de travailler sur un truc qu'ils aiment plutôt que sur un informel système articulé), ça permet de faire un bilan des différents efforts et moments et de réfléchir sur l'équilibre de l'ensemble. Ce n'est pas un outil de conception de moto". Voilà enfin ce que je voulais t'entendre dire (C'est en fait ce que j'essaye de faire comprendre depuis le début: Ni plus, ni moins)... et comme tu le dis, je suis un concepteur et ce sont les outils de conception qui m'intéressent, les thèses pédagogiques non applicable dans le réel, beaucoup moins !.
- Eric Offenstadt a écrit:
Autrement dit SI LE POINT VIRTUEL "A" POUVAIT EXISTER: Il devrait se situer derrière la moto. "c'est possible je peux même te dessiner une moto stupide avec le point A sous le niveau du sol, ça veut simplement dire que quelle que soit la direction de l'action au sol, on sera systématiquement dans le cas où sigma (un angle négatif) est inférieur à tau donc le cas deux. Cette stupide moto s'assiéra systématiquement, quoique fasse son malheureux pilote".
Là on entre dans le vif du sujet ! Une ligne de chaîne "INVERSE" (plus gros pignon de SdB que la couronne pour IUWA=0) met le point A sous le sol, alors que SI le bras conserve le même angle que dans le CROQUIS et qu'aucun des axes ne changent de position : Nous aurons tous les facteurs au vert pour obtenir des anti-squats globaux (avec les C d G) et locaux (Assiette) !!!!! À mon sens cela pourrait vouloir dire que le "Point A" est le résultat d'un hypothèse de travail intéressante, certes, mais erronée (Car n'existant pas réellement en 3 dimensions). Dans un futur échange, je te proposerais, Xenu une détermination À MON SENS plus réaliste d'un point "A".
- Eric Offenstadt a écrit:
Au total, nous disons pratiquement la même chose et je ne suis pas tout à fait sûr que la nuance ne vienne pas uniquement de mon langage déficient.... Vous ne faites pas le même métier.
Tu es concepteur de motos : tu parles le langage technique et concret.
Cosalter a deux casquettes : c'est un chercheur, il essaie de modéliser, de sortir des lois. Pour cela c'est très simple il pose le problème et essaie d'utiliser l'outil mathématique/numérique/informatique pour aller le plus loin possible et voir si les résultats de la simulation collent à la réalité. Parfois il est obligé de déshabiller le problème de son enveloppe technique pour mieux comprendre. Par exemple pour étudier le contact du pneu sur le sol, il peut étudier (c'est juste un exemple) le contact d'un parallélépipède de caoutchouc sur une surface rugueuse. A lui par la suite de réinjecter ces résultats dans son modèle pour rendre au final son simulateur plus performant.
Sa seconde casquette : c'est un enseignant. Il doit offrir à ses étudiants une motivation pour se casser la tête (et surtout "apprendre à apprendre") sur des problèmes à la limite de leurs connaissances présentes. C'est pour ça que le modèle présenté dans ses posters est "rustique". Tous les effets ne sont pas pris en compte parce que ce serait sans doute trop compliqué pour eux.
En particulier il ne prend pas en compte dans ses travaux pédagogiques les "microglissements" que tu a baptisés IUWA. :lol:
...mais dans ses publications de recherche il en parle... et ce n'est pas le seul.
Il serait temps, car si ce chaînon manquant n'est pas pris en ligne de compte, le résultat ne peu être que bancal. J'ajoute que de nos jours, avec les logiciels DAO, on utilise un simulateur de fait, en permanence et que celui là fonctionne pour de vrai ! 
Justement revenons à présent sur les IUWAs.
J'ai lu que tu les exprimais en mm.
je vais t'offrir un et tu me copieras cent fois : "une longueur s'exprime en mm, une accélération s'exprime en mm/s²"
Franchement si un vaudock lisait ça il te demanderait pourquoi tu l’asticotes sur le transfert de masse ou de charge et pourquoi tu écris ça.
Bon on va dire qu'en fait ce sont des iuwD (displacement)
"Si tu veux !j'accepte le bonnet d'âne dès lors que ce que tu dis m'APPREND QUELQUE CHOSE, je sens que je vais le porter souvent on bonnet d'âne !!!!"
"Imaginons que nous soyons dans le cas 1 : c'est l'équilibre parfait entre les moments.
Seulement la piste n'est pas lisse (rappelles moi : ce n'était pas Opatija que les pilotes avaient surnommée "la piste de motocross la plus rapide du monde" ?) d]]Il me semble que c'était Imatra ?[/b] et la roue rencontre un bump de longueur L et de hauteur h.
La moto roule à la vitesse V.
[Vous devez être inscrit et connecté pour voir cette image]
On va supposer que la suspension est parfaite et que le centre de masse de la moto reste à une altitude constante, seule la roue subit une levée de h.
Tu connais parfaitement ta géométrie et ton épure te dit que pour une course de suspension de h ça te crée un iuwD :) de x.
La durée du phénomène est dt = L/V
La vitesse de glissement relative de la roue est donc de Vr = x V/L
En terme de vitesse angulaire : oméga relatif = x V /(L R) si R est le rayon de la roue.
Soit une accélération angulaire (ayé on a enfin des iuwA) : omégaprim = x V²/(L² R)
Donc on va faire un calcul simple on va supposer que la roue est un disque parfait (un disque théorique sans épaisseur de masse m). Le moment d'inertie d'un tel disque est m R²/2
Par conséquent le moment engendré par cet iuwa sera M = m R x V² /(2 L)
Ce moment est à ajouter dans l'équilibre du bras oscillant et selon le signe de ce moment (selon le signe de ton iuwD ou iuwA) la moto sera dans le cas deux ou le cas trois.
Tu vois que finalement il dit TRES EXACTEMENT la même chose que toi !!!
mieux, il te fournit gratuitement un support pédagogique pour expliquer à tous les ânes de pit-lane pourquoi un iuwa+ produit tel effet et un iuwa- tel autre...
Oui, je suis d'accord avec tout çà "Si le point A de Cosalter avait été placé au bon endroit" autrement dit tout le processus de raisonnement est parfait, seule l'hypothèse de départ est fausse... nous en parlerons plus en détail dans un prochain post, mais à mon avis pour que le point A ne sois pas qu'un sujet thématique, il faut qu'il fonctionne aussi avec des pignons/couronnes identique (SANS LES CHANGER D'AXES) car dans le réel je conserve la position des axes de SdB, Bras et roue dans la position Cossalter. Hors là le point A se trouve à l'infini... ![[Technique] La ligne de force de la chaîne. - Page 6 55116](/users/3313/47/10/07/smiles/55116.gif)
Alors un petit bisou à Cosalter ?
Comment est-il ? (Séduisant ?)
Blague à part, je n'ai rien contre Cossalter et je te suis très reconnaissant d'être entré dans ce débat, car il progresse enfin et surtout tu m'apprends des chose essentielles.
Une seule chose compte avancer vers plus de compréhension du problème et c'est formidable pour ce forum !
Si nous pouvions trouver toi et moi un point A qui ne fonctionne pas que virtuellement et à condition que le rapport de démultiplication et même que la taille des pignons/couronne soit uniquement celui proposés par le "croquis de Padoue" : Ce serait le pied bleu !
Il me semble que pour progresser, il faudrait analyser point après point ce que fait le bras (Tu en a déjà fort bien parlé). Ce que fait le "Système de transmission", car je pense que c'est ce que fait SON axe par rapport à l'axe du bras... donc ne mélangeant plus les plans (puisqu'on travaille avec des axes transversaux parallèles) qui peut nous permettre de trouver un point "À" bâtit sur une hypothèse de travail réaliste et correspondant aux tests, c'est à dire à une moto avec beaucoup (trop?) d'anti-squat même avec un angle de chaîne ne rejoignant jamais l'axe de bras vers l'avant de la moto, mais vers l'arrière. (Comme ce fut le cas du proto Tecmas). Ce qui semble montrer qu'il est indispensable de ne pas mélanger "l'effet démultiplication" (IUWA) avec "l'effet de bras" (Squat arrière).
Nos expérimentations (pour ce qu'elles valent) tendraient à montrer que c'est plutôt l'axe d'alignement des pignon/couronne qui devrait être prise ne considération pour "croiser la ligne du bras" en un point A1. Et voir, avec ton aide, si on ne pourrait éventuellement pas conjuguer ce point A1 avec la démultiplication, sachant qu'avec une transmission calculée pour les IUWAs= 0 (l'effet de transmission est nul, donc il n'est plus "pro-quat" comme avec un petit pignon de SdB) |
| | | | Ed

Nombre de messages : 2560
Age : 61
Localisation : CHALETTE
Date d'inscription : 06/10/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 17:43 | |
| Pour participer un peu, voici un document que j'ai rédigé il y a quelques mois :
effet de chaine ou de bras lien correct page suivante !
Ce document permet de retrouver les résultats affichés sur les posters de Padoue.
Comme Xenu y fait référence et semble (comme moi) plutôt d'accord avec ce qui y est exposé, je propose une autre manière d'y parvenir. Mais au final je pense qu'on raconte la même chose...
J'avoue hélas ne pas avoir tout relu et vérifié les démonstrations de ces derniers jours, non par manque de respect mais plutôt par flemme car j'essaie de me déconnecter de Pit lane !
Damned, encore loupé !
Dernière édition par Ed le Dim 31 Juil - 17:59, édité 1 fois |
| | | | Pickup
Nombre de messages : 1124
Age : 60
Localisation : 91
Date d'inscription : 29/09/2008
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 19:45 | |
| - Ed a écrit:
- mais plutôt par flemme car j'essaie de me déconnecter de Pit lane !
Damned, encore loupé !
Idem lol, ça devient un boulot en temps plein , pour lire et interpréter tous les posts de PLB lol perso , j'ai abandonné depuis longtemps , je me contente de surfer sur la vague et je ne réponds qu'au gré de mes pensées en fonction de mes lectures à l'instant T PS sinon , bravo Xenu , j'ai pas tout lu (sauf en diagonal pour en sous-tirer l'esprit seulement ) mais j'ai cru voir comprendre que tu es un maitre du langage.... Car il faut être vraiment fort pour réconcilier Pépé avec le discours philosophique universitaire scientifique usuel et conventionnel ![[Technique] La ligne de force de la chaîne. - Page 6 101130](/users/3313/47/10/07/smiles/101130.gif) ![[Technique] La ligne de force de la chaîne. - Page 6 72689](/users/3313/47/10/07/smiles/72689.gif) |
| | | | pizzagalli

Nombre de messages : 76
Age : 72
Localisation : suisse
Date d'inscription : 09/06/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 20:03 | |
| Ed,
ton lien ne fonctionne pas, peux-tu le refaire sTp.
Merci d'avance.
Mac |
| | | | pizzagalli
Nombre de messages : 76
Age : 72
Localisation : suisse
Date d'inscription : 09/06/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Sam 30 Juil - 20:57 | |
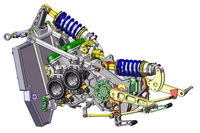
| [Vous devez être inscrit et connecté pour voir cette image]La géométrie du train arrière est celui de la Cagiva V594 de 1994. Lors d'essai réalisé par le magazine allemand PS de 1994, les mesures suivantes ont été faites: de 0 à 100km/h en 2.39 sec. Ce qui faite une accélération de 11.6 m/sec2. La masse est de 220 kg, pilote +moto La force de poussée est de F=m*a= 220 * 11,6 = 2552 N OUI, 250 Kp, c'est le vecteur P Le vecteur Fp est la réaction du moyeu, 1240 Kp Le vecteur TC est la tension dans la chaine, 980 Kp. Le vecteur V est une composante verticale sur le pneu de 110 Kp. Cette force comprime le pneu en plus de la force dû à la masse de la moto. Dans ce dessin, il est tenu compte que de l'effort de la chaîne, le calcul complet avec la masse de la moto sera fait ultérieurement. Le vecteur V est certainement un effet de IUWA que Pépé parle, mais il n'est surtout pas négligeable. On voit aussi que les efforts sur une chaîne sont énormes (à mes yeux). Le point A est un point ou passe toutes les forces en jeu dans ce dessin, il n'est pas vers (sur ) le centre de gravité. Avec cette méthode de calcul on voit que les vecteurs peuvent être nos amis. ' ' |
| | | | Xenu
Nombre de messages : 30
Localisation : france
Date d'inscription : 24/04/2011
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Dim 31 Juil - 4:20 | |
| Pour commencer je voudrais tous vous féliciter pour avoir enterrées vos haches de guerre. Je suis heureux de voir que tout le monde participe et ce dans la bonne humeur. - Eric Offenstadt a écrit:
Non XENU ! Là çà ne fonctionne que si tu as changé la localisation de l'axe de sortie de boite, et tu sais bien qu'alors l'alignement des axes serait impossible et qu'alors la production d'IUWA détruirait le pneu en 2 coups de cuillère à pot !!! : Vilain garçon ! krkrkr Je n'ai pas cherché à faire un "truc qui fonctionne" sur un croquis, j'ai juste voulu indiquer le point A :) Tu parles de l'usure des pneus : ce n'est pas un phénomène pris en compte dans le modèle pédagogique de Padoue. - Eric Offenstadt a écrit:
Là on entre dans le vif du sujet ! Une ligne de chaîne "INVERSE" (plus gros pignon de SdB que la couronne pour IUWA=0) met le point A sous le sol, alors que SI le bras conserve le même angle que dans le CROQUIS et qu'aucun des axes ne changent de position : Nous aurons tous les facteurs au vert pour obtenir des anti-squats globaux (avec les C d G) et locaux (Assiette) !!!!! À mon sens cela pourrait vouloir dire que le "Point A" est le résultat d'un hypothèse de travail intéressante, certes, mais erronée (Car n'existant pas réellement en 3 dimensions). Dans un futur échange, je te proposerais, Xenu une détermination À MON SENS plus réaliste d'un point "A". Le point A (ce n'est pas un point mais un axe : une droite perpendiculaire à la moto) existe en 3 D, et comme il bouge (varie dans le temps) il existe même en 4D. :) Ce point n'est qu'un intermédiaire de calcul. Il n'a pas d'existence matérielle. C'est simplement le point qui "pourrait" appartenir au bras pour lequel le moment de la tension de la chaine est nul. Et comme on veut comparer le moment de la résultante dynamique des efforts sur le pneu avec le moment de la tension de chaine, pour le raisonnement il est plus facile pour l'esprit de se placer virtuellement en point pour raisonner parce qu'un des deux moment est nul. C'est comme si tu avais deux bidons contenant du liquide : pour mesurer la quantité totale de liquide tu verses (par la pensée) le contenu d'un bidon dans l'autre et que tu ne mesures le volume de liquide que dans un seul. On est pas du tout obligé d'utiliser ce point A, c'est juste bien pratique comme support de raisonnement. - Eric Offenstadt a écrit:
Il serait temps, car si ce chaînon manquant n'est pas pris en ligne de compte, le résultat ne peu être que bancal. J'ajoute que de nos jours, avec les logiciels DAO, on utilise un simulateur de fait, en permanence et que celui là fonctionne pour de vrai ! Les logiciels de DAO ne sont pas vraiment des simulateurs... Il y a ici des gens qui sont plus spécialistes que moi, mais je crois me souvenir qu'on réserve le terme de DAO aux outils 2D et celui de CAO aux 3D. Ces outils DAO et CAO ne sont pas des simulateurs, mais parfois ils sont pourvus de modules permettant effectivement la simulation. Je crois que Solidworks par exemple a un module CosmosMotion qui peut faire de la simulation dynamique. Je n'ai pas testé ce n'est pas ma spécialité. Je ne m'avancerais pas sur la qualité du produit. je pense que des outils comme Adams ou peut être Simulink (Matlab) doivent pouvoir faire aussi de la simulation dynamique. Personnellement je suis un peu le saint thomas des codes numériques et j'aime bien savoir ce qu'il y a dedans (surtout les équations) : j'ai horreur des "boites noires" faites par les autres et j'utilise soit de l'open source soit du fait maison. :) Donc je ne suis pas spécialiste... - Eric Offenstadt a écrit:
Oui, je suis d'accord avec tout çà "Si le point A de Cosalter avait été placé au bon endroit" autrement dit tout le processus de raisonnement est parfait, seule l'hypothèse de départ est fausse... nous en parlerons plus en détail dans un prochain post, mais à mon avis pour que le point A ne sois pas qu'un sujet thématique, il faut qu'il fonctionne aussi avec des pignons/couronnes identique (SANS LES CHANGER D'AXES) car dans le réel je conserve la position des axes de SdB, Bras et roue dans la position Cossalter. Hors là le point A se trouve à l'infini... Ce n'est pas important, le point A est là où il est, c'est juste un point virtuel servant à "économiser" du calcul. Il n'y a pas de "bon" ni de "mauvais" endroit. Par contre effectivement ça peut être utile au concepteur qui a fait l'épure de sa suspension pour se dire au premier coup d'oeil : "ma suspension est une me*de" ou "ouais, ça a l'air pas mal ce que j'ai fait". - Eric Offenstadt a écrit:
Si nous pouvions trouver toi et moi un point A qui ne fonctionne pas que virtuellement et à condition que le rapport de démultiplication et même que la taille des pignons/couronne soit uniquement celui proposés par le "croquis de Padoue" : Ce serait le pied bleu ![/b]
Malheureusement ce point n'a pas d'existence réelle. Il est certain que en moto tout est affaire de compromis, c'est à dire qu'il a des choix "a priori" qui sont faits et qu'ensuite on fait comme on peu pour trouver la moins mauvaise conception qui réponde à ce cahier des charges. Toute la difficulté étant dans ces "compromis" qu'on accepte dès le début. par exemple, mais nous aurons l'occasion d'en reparler dans un autre topic, le compromis de la position du pilote peut être remis en cause ce qui du coup ouvrirait la voie à de nouvelles réflexions, mais cela entrainerait d'autres défauts etc... - Eric Offenstadt a écrit:
Il me semble que pour progresser, il faudrait analyser point après point ce que fait le bras (Tu en a déjà fort bien parlé). Ce que fait le "Système de transmission", car je pense que c'est ce que fait SON axe par rapport à l'axe du bras... donc ne mélangeant plus les plans (puisqu'on travaille avec des axes transversaux parallèles) qui peut nous permettre de trouver un point "À" bâtit sur une hypothèse de travail réaliste et correspondant aux tests, c'est à dire à une moto avec beaucoup (trop?) d'anti-squat même avec un angle de chaîne ne rejoignant jamais l'axe de bras vers l'avant de la moto, mais vers l'arrière. (Comme ce fut le cas du proto Tecmas). Ce qui semble montrer qu'il est indispensable de ne pas mélanger "l'effet démultiplication" (IUWA) avec "l'effet de bras" (Squat arrière).
Nos expérimentations (pour ce qu'elles valent) tendraient à montrer que c'est plutôt l'axe d'alignement des pignon/couronne qui devrait être prise ne considération pour "croiser la ligne du bras" en un point A1. Et voir, avec ton aide, si on ne pourrait éventuellement pas conjuguer ce point A1 avec la démultiplication, sachant qu'avec une transmission calculée pour les IUWAs= 0 (l'effet de transmission est nul, donc il n'est plus "pro-quat" comme avec un petit pignon de SdB) La mécanique c'est très facile, ça ne laisse pas de place à l'improvisation ni à l'intuition (enfin si, au début). Je vais essayer de prendre une analogie avec ton métier : le pilotage. Tu as les pilotes brouillons qui conduisent "à la louche" : ils freinent "au trouillomètre" et passent là où ils peuvent et en général comme il peuvent. Tu as les experts (comme toi) qui pilotent "aux repères" : une fois qu'ils ont bien tout repéré aux essais, ils freinent à tel repère, vont chercher la corde à tel autre, accélèrent à tel autre etc.. le tout en "débranchant" le trouillomètre pour ne pas réfléchir inutilement. Pas d'improvisations en cours de pilotage. La mécanique c'est exactement pareil. Au début il y a une phase de "modélisation". On fait des hypothèses simplificatrices parce que le monde réel est infiniment trop compliqué. Par exemple si je pose mon doigt sur la table c'est très très compliqué : le contact se fait suivant ma peau en suivant le contour des empreintes digitales, il faut tenir compte de la déformation du doigt, mais aussi de la pression sanguine qui empêche le doit de s'écraser, de la déformation infinitésimale de la table etc ... En fait l'hypothèse simplificatrice qu'on fait tous : on dit que c'est un contact ponctuel, on y colle une force (un vecteur :) ) et basta. Donc l'intervention "humaine" dans un problème de mécanique se fait uniquement au début : que vais-je considérer et que vais-je négliger ? Une fois ces hypothèses posées, le tout se déroule quasiment "en automatique", même un diplômé de padoue peut le faire. :) Tu as évidemment des "mécaniciens brouillons" qui calculent "à la louche", modifient les hypothèses en cours de calcul et au final font de grosses bêtises. par exemple tu considères certainement, comme d'ailleurs dans le modèle pédagogique de Cossalter, que le cadre est indéformable. C'est faux : un cadre est élastique, on parle bien de "rigidité en torsion" par exemple, ça veux bien dire qu'il (peut) y a(voir) une déformation. Mais peut être "en première approximation" cette déformation est-elle négligeable. C'est là que l'intervention humaine (le boulot de Newey par exemple) est primordiale. Il faut choisir ce qui est "a priori" important avant d'avoir fait les calculs. Il faut du flair et de l'instinct. Par exemple le modèle pédagogique n'a pas pris en compte les iuwas, mais ça ne veut pas dire qu'il est faux : il ne fait pas "d'erreurs de calcul", les résultats sont conformes à ses hypothèses. Bon tout n'est pas perdu pour ceux qui n'ont pas de flair : quand on a pas de tête il faut avoir des jambes. Ils vont faire et refaire les calculs en prenant en compte à chaque fois des hypothèses différentes et comparer les résultats pour voir si il y a une différence. C'est épuisant... :) Passons en revue les différents composants de l'arrière de la moto (c'est très con comme hypothèse, en fait il faut considérer TOUTE la moto, si on ne veut pas louper quelque chose). C'est juste pour l'exemple. Isolons par la pensée la roue munie de sa couronne et de sa broche. Nous avons une action sur la couronne provenant de la tension de la chaine. (là aussi c'est une des hypothèses "a priori" (pas forcément intelligente) mais j'ai "imposé" une transmission par chaine, si j'avais choisi une autre transmission, mes efforts seraient différents) Nous avons un effort (important c'est la liaison au sol) du sol sur le pneu : nous allons décomposer cet effort en trois parties. - la partie statique qui est l'effort sur le pneu à l'arrêt provenant du seul poids statique agissant sur la roue arrière. - la partie dynamique provenant des "forces d'inertie" : le fameux transfert de charge. - la partie iuwa provenant des microglissements et ça c'est TOI, c'est TON épure qui va nous les donner. Nous avons aussi les efforts sur chaque coté de la broche, ces efforts ne sont pas égaux et le moment du couple qu'ils forment s'oppose à la mise en travers de la roue puisque la couronne n'est pas dans le plan médian de la roue. Isolons à présent par la pensée la bras oscillant: Nous avons efforts provenant de la broche qui sont opposés à ceux dont on vient de parler plus haut. Nous avons l'effort de (ou des) combiné(s) amortisseur(s) : là aussi décomposons cette force en une parie "statique" et une surcharge "dynamique". Nous avons les efforts sur l'axe provenant des paliers : c'est une liaison rotoide, donc une force mais pas de moment. Nous avons deux roulements donc deux forces, pas forcement égales : leur moment reprendra le moment de braquage du bras. Passons à présent au cadre nous avons l'effort de l'amortisseur (égal et opposé à celui du bras) les actions sur les roulements du bras oscillant (idem) et l'effort de la chaine sur la pignon de sortie de boite (et son moment). Evidemment au centre de masse de la moto (du cadre) s'applique le poids et les "forces d'inertie". Tu vois, une fois posées les hypothèses, même pas besoin de réfléchir, un lycéen pourrait le faire. Ensuite assemblons les morceaux. Si je monte la roue dans le bras oscillant, les actions sur la broche disparaissent puisqu'elles deviennent des actions intérieures. Si je monte le bras sur le cadre, les actions sur l'axe disparaissent aussi puisqu'ils deviennent intérieurs. Attention, je n'ai pas monté la chaine ni l'amorto, les forces subsistent. Je veux étudier le mouvement du bras dans cet ensemble. - j'ai l'action au sol - j'ai la tension de la chaine. - j'ai l'effort de l'amorto. Je vais considérer que la composante statique de l'action au sol est parfaitement équilibrée par la composante statique de l'amorto. Je les retire pour simplifier le calcul. Pour étudier le mouvement du bras, il est évident que le seul mouvement "cinématiquement admissible" ne peut être qu'un pivotement autour de son axe, je vais donc uniquement faire un bilan des moments qui s'exercent dessus. Trois forces, ça me fait trois moments : c'est beaucoup pour ma petite tête, je vais essayer de voir s'il n'y a pas une façon très particulière de considérer le problème qui me faciliterait pas la vie. Nota : si je ne suis "pas astucieux" et que je ne trouve pas le truc, ce n'est pas grave, je sors la "grosse artillerie mathématique" et je résout le problème (quand on a pas de tête, jambes toussa...). Je vais considérer le cas le plus simple pour mon petit cerveau celui où la moto ne change pas d’assiette. Si elle en change pas d'assiette c'est que la surcharge dynamique demandée à l'amorto est nulle. Chouette je n'ai plus que DEUX forces dont il faut considérer les moments : si les moments sont égaux c'est que l'équilibre est réalisé. Oui mais comme je suis un grosse feignasse deux c'est encore trop pour moi. Existe-t-il un point particulier qui permettrait à ma flemme de s'épanouir, c'est à dire un point ou le moment de l'une des deux forces serait nul ? Ce point (tout droit issu de mon imagination) c'est le point A (en fait l'axe A). peut importe où il se trouve, sur la lune ou dans le cul d'un chameau, il "doit exister" un point tel que le moment de l'effort dû à la tension de la chaine soit nul. Maintenant essayons vite d'exprimer le moment de la seule force qui me reste (l'action au sol dont j'ai retranchée la partie statique) par rapport à l'axe A. Quand est-ce que ce moment est nul ? (il faut qu'il soit nul, comme un boulet de feignasse je viens de prendre le cas où les deux autres moments sont nuls). Le seul cas où ce moment est nul c'est lorsque le support de l'action au sol (moins la composante statique) passe par l'axe A. C'est le cas 1. Ca y est j'ai réussi mon équilibre. Ensuite fastoche je considère le cas où la force est en dessus et celui où elle est en dessous et hop je bidouille les signes et voilà (cas 2 et 3)... :) Maintenant il est tout à fait possible que la position du point A soit telle que je ne puisse jamais y faire passer la force : ça veut dire que le cas 1 n'existera pas. Tu vois : la mécanique c'est très simple finalement. Si mes hypothèses ne conviennent pas on les change tout au début et on reprend le raisonnement avec de nouvelles valeurs.  |
| | | | fpayart
Nombre de messages : 1251
Age : 75
Localisation : LYON
Date d'inscription : 11/01/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Dim 31 Juil - 5:20 | |
| Remarquables capacités pédagogiques Merci pour cette révision du cours de statique, classe de 2ème. Moi aussi j'avais cessé de lire les laïus chiants inextricables de PP (dont je ne conteste d'ailleurs pas le fond). Avec toi je vais y reprendre goût. Remarque personnelle : dommage que tu aies occulté de renseigner ton âge, et de préciser ta localisation |
| | | | Giesse
Nombre de messages : 446
Localisation : Eure et loire
Date d'inscription : 14/10/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Dim 31 Juil - 6:27 | |
| |
| | | | mickie

Nombre de messages : 1931
Age : 72
Localisation : Frontignan 34, les pieds dans l'eau!
Date d'inscription : 13/06/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Dim 31 Juil - 7:08 | |
| +1 aussi! Ce que j'apprécie par dessus tout, ce n'est pas tant la démo que je n'arrive pas à suivre, c'est le fait que notre ami Xenu s'exprime en bon Français et sans fautes d'orthographe! Quand je vois un gars poster un message aussi long, des fois, j'ai peur!...
_________________
Volem rien foutre al païs! Gardarem lou hamac!
|
| | | | jmdonnat

Nombre de messages : 1185
Age : 70
Localisation : france (gard)
Date d'inscription : 07/07/2010
| | Sujet: Re: [Technique] La ligne de force de la chaîne. Dim 31 Juil - 7:38 | |
| - Xenu a écrit:
Ce point n'est qu'un intermédiaire de calcul. Il n'a pas d'existence matérielle. C'est simplement le point qui "pourrait" appartenir au bras pour lequel le moment de la tension de la chaine est nul.
Et comme on veut comparer le moment de la résultante dynamique des efforts sur le pneu avec le moment de la tension de chaine, pour le raisonnement il est plus facile pour l'esprit de se placer virtuellement en point pour raisonner parce qu'un des deux moment est nul.
C'est comme si tu avais deux bidons contenant du liquide : pour mesurer la quantité totale de liquide tu verses (par la pensée) le contenu d'un bidon dans l'autre et que tu ne mesures le volume de liquide que dans un seul.
On est pas du tout obligé d'utiliser ce point A, c'est juste bien pratique comme support de raisonnement.
Je me joins au coeur des mécanos enamourés et je t'exprime ma reconnaissance. Je conclus de la citation ci-dessus que tu peux (tu vas ?) nous parler des CIR... (mécanique, calme et volupté !) |
| | | | Contenu sponsorisé
| | Sujet: Re: [Technique] La ligne de force de la chaîne. | |
| |
| | | | | | [Technique] La ligne de force de la chaîne. | |
|
Sujets similaires | |
|
| | Permission de ce forum: | Vous ne pouvez pas répondre aux sujets dans ce forum
| |
| |
| |
![[Technique] La ligne de force de la chaîne. - Page 6 Empty](https://2img.net/i/fa/empty.gif)






![[Technique] La ligne de force de la chaîne. - Page 6 2878](/users/3313/47/10/07/smiles/2878.gif)